
Introduction
Materials and Methods
자주식 마늘 수집기
동력전달시스템
부하계측시스템 구성
필드 시험
시뮬레이션 모델
데이터 분석
Results and Discussion
수집기 주행부 부하 시뮬레이션
수집기 수집부 부하 시뮬레이션
수집기 이송부 부하 시뮬레이션
수집기 전체 소요동력 시뮬레이션
Conclusion
Introduction
국내 농업은 농촌 인구 감소와 고령화의 심화로 인해 농업 노동력 공급이 빠르게 감소하고 있다. 2024년 기준 국내 농가인구는 200만 4천 명으로 전년 대비 4.1% 감소하였으며, 65세 이상 고령인구 비율은 55.8%로 전국 평균(19.2%)의 약 2.9배에 달해 농촌의 인력 취약성이 더욱 커지고 있다(Statistics Korea, 2025a). 이러한 노동력 문제는 노동의존도가 높은 밭작물 재배에서 더욱 두드러진다. 마늘 재배면적은 2005년 31,766 ha에서 2025년 22,947 ha로 감소하였다(Statistics Korea, 2025b). 마늘 수확작업은 난지형 기준 전체 생산 노동시간 91.2 h/10a 중 16.7 h/10a로 18.31%를 차지하는 노동 부담이 큰 주요 공정 중 하나로 보고되었으며(Choi et al., 2023), 이는 농촌 노동력 부족이 심화되는 상황에서 마늘 수확 기계화의 필요성이 더욱 커지고 있음을 보여준다.
마늘 수집형 수확기를 활용하면 관행 대비 89.3%의 노동력을 절감할 수 있는 것으로 보고된 바 있으나(Choi et al., 2023), 2023년 기준 마늘 수확 기계화율은 59.7%에 머물러 있어 기계화의 효과가 현장에서 충분히 확산되지 못하고 있다(RDA, 2024). 한편, 현재 상용화된 마늘 수집기는 주로 경험적 설계에 기반하여 개발되어 왔으며, 이에 따라 설계 최적화와 작업조건별 성능 예측을 위한 정량적 분석의 필요성이 제기된다. Do 등 (2025)은 자주식 마늘 수집기를 대상으로 다양한 작업속도에 따른 소요동력을 평가한 결과 총소요동력이 엔진 정격출력의 약 30% 이하 수준에 불과함을 확인하였다(Do et al., 2025). 그러나 이러한 실측 기반 연구는 다양한 토양 및 작업 조건에 대한 반복 실험에 많은 비용과 시간이 소요되며, 설계 변경에 따른 소요동력 변화를 사전에 예측하기 어렵다는 한계가 있다. 따라서 마늘 수집기의 설계 최적화와 작업조건별 성능 예측을 위해서는 실측 부하 데이터를 기반으로 검증된 시뮬레이션 모델 개발이 필요하다.
농업기계 분야에서는 이러한 실측의 한계를 보완하기 위해 다물체 동역학(Multi-Body Dynamics, MBD) 시뮬레이션을 활용한 부하 예측 연구가 수행되고 있다. Kim 등 (2022)은 DEM (Discrete Element Method)과 MBD를 연성하여 트랙터의 견인력 예측 모델을 개발하여 90.8%의 예측 정확도를 달성하였다(Kim et al., 2022). Jeon 등 (2023a)은 크롤러형 밭작업 플랫폼의 구동 토크를 RecurDyn 기반 MBD로 예측하고 계측 데이터와 비교하여 모델을 검증하였으며(Jeon et al., 2023a), Jeon 등 (2023b)은 트랙터의 차축 토크를 동역학 시뮬레이션으로 예측하였다(Jeon et al., 2023b). Park 등 (2024a)은 전동 4륜구동 농업용 차량의 MBD 시뮬레이션 모델을 개발하여 차축 토크 및 출력을 예측하고 계측 결과와 비교하여 평균 오차 3.42% 이내의 정확도를 검증하였으며(Park et al., 2024a), Park 등 (2024b)은 동일 플랫폼을 대상으로 다양한 견인력 조건에서의 차축 토크를 MBD 시뮬레이션으로 분석하였다(Park et al., 2024b). Zhou 등 (2023)은 반궤도형 트랙터의 MBD 모델을 구축하여 속도 오차 2.1%에서 2.7% 수준의 높은 정확도를 검증하였다(Zhou et al., 2023). 그러나 위와 같은 선행연구들은 트랙터 또는 범용 주행 플랫폼을 대상으로 수행되었으며, 복수의 작업부가 독립적으로 구동되는 수확기 및 수집기에 MBD를 적용하여 주요부별 소요동력을 예측한 연구는 아직 제한적인 실정이다.
따라서, 본 연구는 MBD 기반 마늘 수집기 시뮬레이션을 개발하여 각 주요부의 소요동력을 예측하는 것을 목적으로 한다. 이를 위해 MBD 기반 동역학 시뮬레이션 모델을 개발하고, 토양 물성이 상이한 합천 및 의성 2개 지역에서 수행한 현장 부하 계측 결과와 비교하여 모델의 예측 정확도를 검증하였다. 세부 연구목표는 1) 자주식 마늘 수집기의 주행부, 수집부, 이송부를 각각 독립된 서브시스템으로 구성한 동역학 시뮬레이션 모델 개발, 2) 각 주요부의 부하 계측시스템을 개발하고 합천 및 의성 2개 지역의 실작업 조건에서 부하 계측, 3) 시뮬레이션 결과와 필드 계측 결과를 비교함으로써 모델의 검증을 수행하는 것이다.
Materials and Methods
자주식 마늘 수집기
본 연구에서 사용한 자주식 마늘 수집기는 정격출력 40.2 kW급이며, 다음과 같이 세 개의 주요부로 구성된다. 주행부(driving part)는 크롤러(crawler track) 방식의 무한궤도로 구성되며, 수집부(collection part)는 기어–체인 기구를 통해 포장면의 마늘을 수집한다. 이송부(transport part)는 수집된 마늘을 후방으로 이송하면서 이물질을 분리한다. 수집기의 외형 치수는 5,580 mm (L) × 2,205 mm (W) × 2,100 mm (H)이며, 공차 중량은 3,170 kg이다. 탑재된 엔진은 4기통 수냉식 4행정 직렬형 터보차저 디젤 엔진으로, 정격출력은 2,600 rpm에서 40.2 kW이며, 최대 토크는 1,700 rpm에서 182.6 N·m이다. 수집기의 측면 및 전면 외관은 Fig. 1과 같다. Table 1은 실험에 사용된 자주식 마늘 수집기의 세부 제원을 나타낸다.

Table 1.
Specifications of the self-propelled garlic collector
동력전달시스템
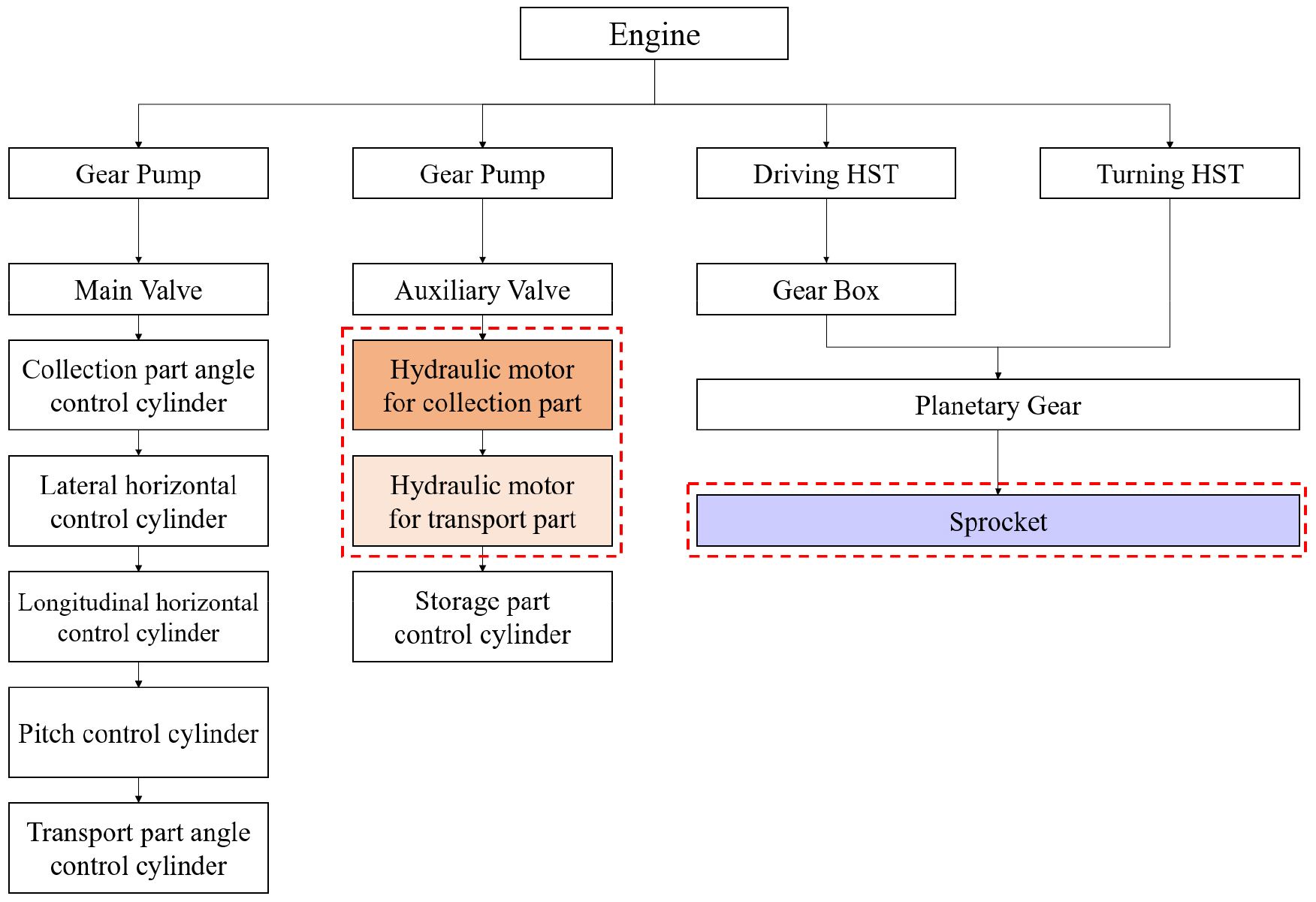
자주식 마늘 수집기의 동력전달시스템은 Fig. 2와 같이, 엔진으로부터 두 개의 정유압 변속기(Hydrostatic transmission, HST), 기어 펌프에 연결된 주 유압 밸브 및 보조 유압 밸브를 통해 각 주요부(주행부, 수집부, 이송부)로 동력을 분배하는 구조로 구성된다.
주행부의 동력은 주행용 HST와 선회용 HST를 통해 전달된다. 주행용 HST는 유압모터를 통해 변속부로 동력을 전달하여 직진 주행을 수행하며, 선회용 HST는 선회 제어 신호에 따라 좌우 유성기어의 링기어 회전속도를 차등 제어하여 좌우 크롤러 간 속도 차이를 통해 수집기의 선회를 수행한다. 두 HST를 통해 최종적으로 전달된 동력은 주행부 구동 스프로켓에 공급되어 무한궤도를 구동한다.
주 유압 밸브는 엔진 PTO (Power Take-Off)에 연결된 기어 펌프로부터 작동유를 공급받으며, 연결된 솔레노이드 밸브를 통해 수집부 및 이송부의 각도 제어, 좌우 수평, 전후 수평, 피칭을 포함한 총 5개의 실린더를 제어한다. 보조 유압 밸브는 작업 연동성 및 안정성을 위해 주행용 HST의 Transmission PTO에 연결된 기어 펌프로부터 작동유를 공급받는다. 보조 유압 밸브에 연결된 3개의 솔레노이드 밸브 중 1개는 수집부 유압모터에 유량을 공급하며, 이송부 유압모터는 수집부 유압모터를 통과한 잔여 유량이 재유입되는 직렬 회로로 설계되어 있다.
본 연구에서는 Fig. 2에서 점선 박스로 구분한 주행부 구동 스프로켓, 수집부 유압모터 및 이송부 유압모터를 주요 동력소모원으로 선정하였다. 주 유압 밸브를 통해 구동되는 제어 실린더와 보조 유압 밸브를 통해 구동되는 저장부 실린더는 작업 중 비연속적으로 작동하며, 상대적으로 낮은 동력 소모로 인해 평균 소요동력 산출에 미치는 영향이 제한적이므로 분석 대상에서 제외하였다.
부하계측시스템 구성
주요 동력소모원의 부하를 계측하기 위하여 Fig. 3과 같이 부하계측시스템을 개발하였다. 주행부는 좌우 구동 스프로켓에 스트레인게이지를 부착하고, 텔레메트리 시스템(SV_4b_Fu_RMC, MANNER Sensortelemetrie GmbH, Spaichingen, Germany)을 이용하여 회전 중인 스프로켓의 토크를 계측하였다. 스프로켓 회전속도는 별도로 제작한 지그에 엔코더(E50S8, Autonics, Busan, Korea)를 장착하여 계측하였다. 수집부와 이송부는 각 유압모터 입구 배관에 유량 센서(Hysense QG100, Hydrotechnik, Limburg an der Lahn, Germany)와 압력 센서(Hysense PR130, Hydrotechnik, Limburg an der Lahn, Germany)를 설치하여 유량 및 압력을 계측하였다. 수집기의 주행속도는 차체에 RTK 기반 GNSS 수신기(MRP-2000, MBC RTK, Seoul, Korea)를 장착하여 계측하였다. 모든 센서 데이터는 다채널 데이터 수집장치(QuantumX MX840B, HBM, Darmstadt, Germany) 2대를 통해 동기화하여 저장하였다. Table 2는 부하계측시스템에 사용된 센서 및 데이터 수집장치의 상세 사양을 나타낸다.
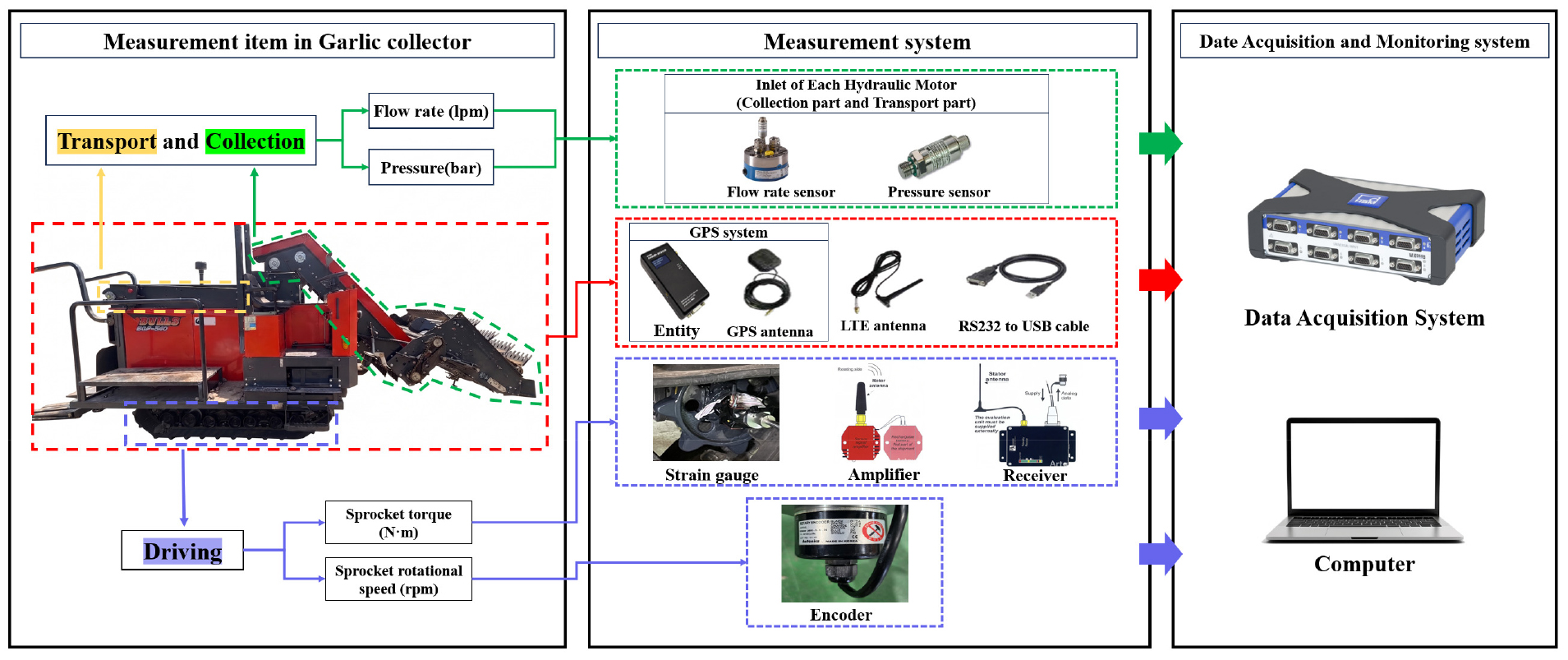
Table 2.
Specifications of sensors and data acquisition system used in the load measurement
필드 시험
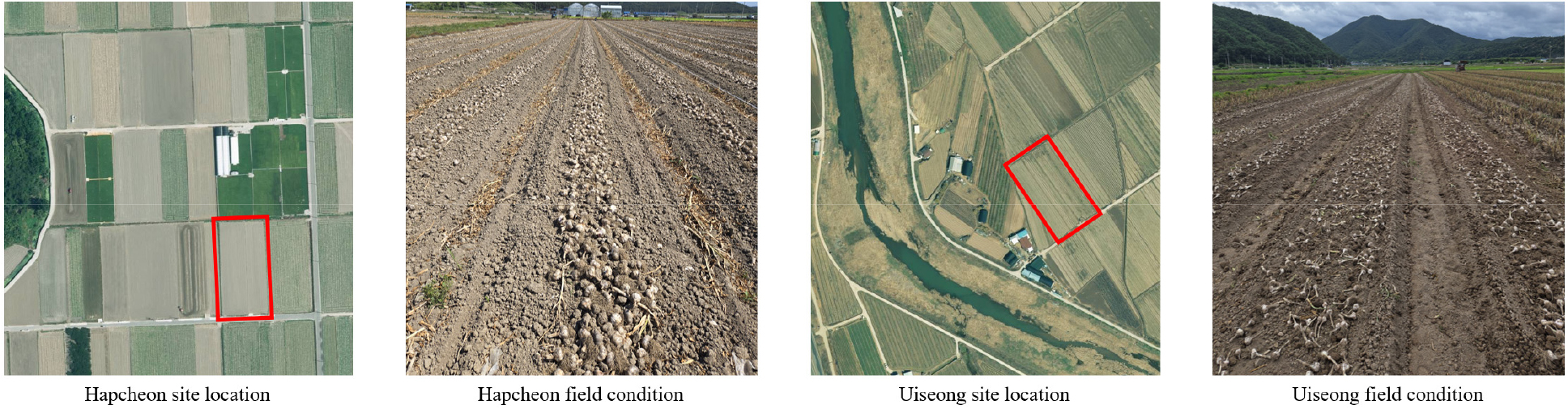
계측 시험은 토양 물성이 서로 다른 국내 마늘 주산지 2개소에서 수행하였다. 실험 지역은 Fig. 4와 같이, 난지형 마늘 주산지인 경상남도 합천군 덕곡면 학리(35°37′19.5″N, 128°21′26.3″E)와 한지형 마늘 주산지인 경상북도 의성군 의성읍 도동리(36°19′50.2″N, 128°42′23.4″E)에 위치한 마늘 재배 포장으로 선정하였다. 합천 시험지의 토양은 미사질양토(silt loam)에, 의성 시험지의 토양은 식양토(clay loam)에 해당한다.
실험은 굴취가 완료된 포장을 대상으로 자주식 마늘 수집기를 이용한 수확 작업을 수행하면서 각 주요부의 부하 데이터를 계측하는 방식으로 수행하였다. 주행속도는 수집기의 목표 작업 능률(0.9 h/10a)과 수집부 작업 폭(1,200 mm)을 기반으로 산정된 0.257 m/s를 기준 조건으로 설정하였다. 수집부 회전속도는 실제 수확 작업 시 사용되는 조건을 반영하여 평균 약 82 rpm 수준으로, 엔진 회전속도는 표준 작업 단수를 적용하여 약 2,400 rpm에서 각각 일정하게 유지한 상태로 실험을 수행하였다. 시뮬레이션 모델의 검증을 위하여 주행속도 0.257 m/s 조건에서 계측된 좌우 스프로켓 회전속도와 수집부 및 이송부 회전속도를 입력 조건으로 적용하였으며, 좌우 스프로켓 회전속도(rpm) 및 구동 토크(N·m), 수집부 및 이송부의 회전속도(rpm) 및 구동 토크(N·m), 각 주요부의 소요동력(kW)을 분석 항목으로 산출하였다.
시뮬레이션 모델
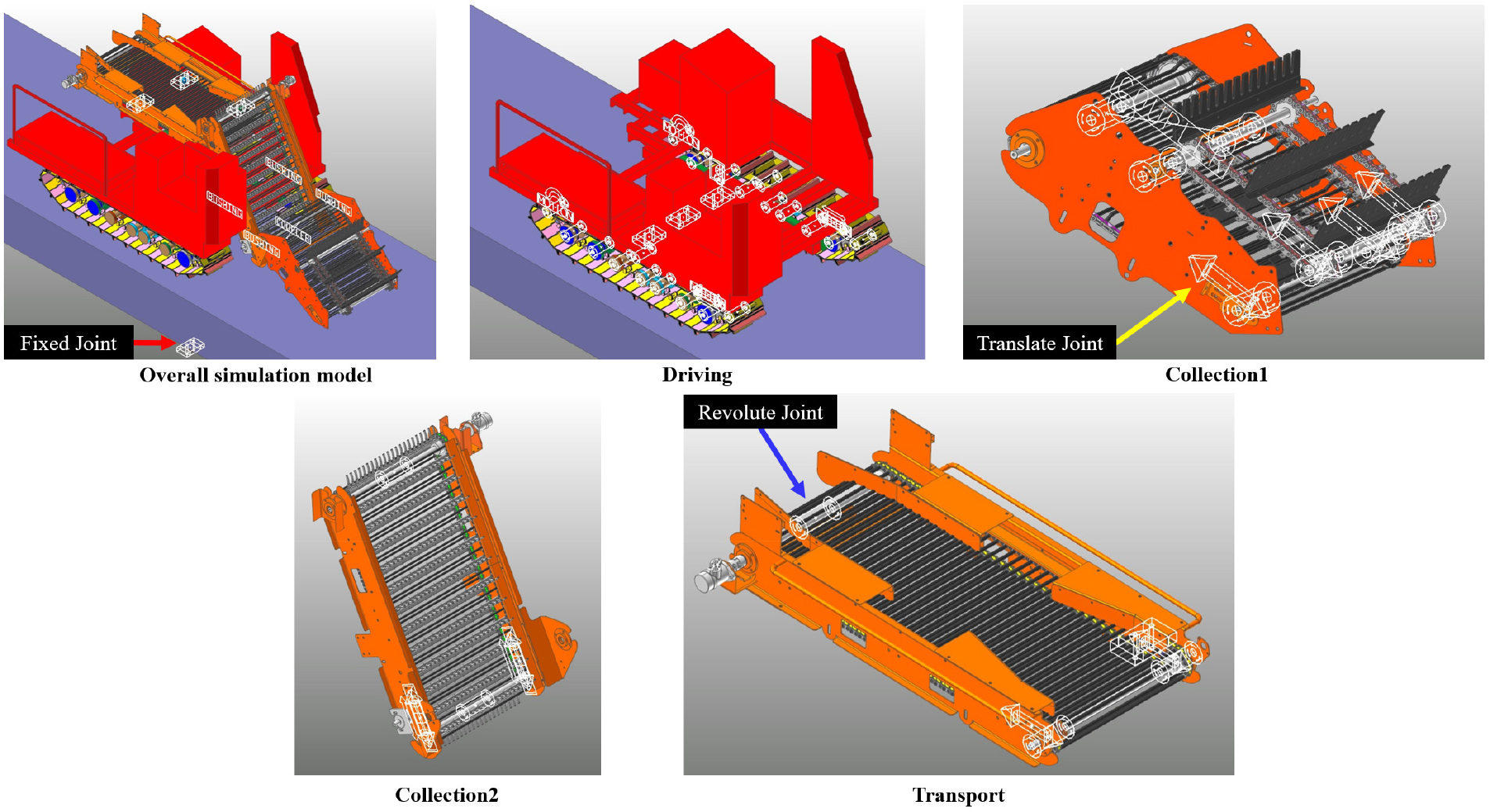
마늘 수집기의 각 주요부별 소요동력을 예측하기 위하여 상용 다물체 동역학 소프트웨어인 RecurDyn (V9R4, FunctionBay Inc., Seongnam, Korea)을 이용하여 동역학 시뮬레이션 모델을 개발하였고, 이를 Fig. 5에 나타내었다. 시뮬레이션 모델은 수집기의 주행부, 수집부, 이송부를 각각 독립된 서브시스템(subsystem)으로 정의하고 하나의 전체 시스템 모델로 통합하여 구성하였다.
주행부는 무한궤도 구조를 반영하여 스프로켓, 아이들러, 상부 및 하부 롤러와 궤도 링크로 구성하였다. 궤도 링크는 Clone body로 모델링한 후, Linked Assembly Toolkit (LATK)을 이용하여 접촉(contact)과 힘(force) 요소가 자동 생성되도록 구성하였으며, 각 구성 요소 간에는 회전 조인트(revolute joint), 고정 조인트(fixed joint), 병진 조인트(translational joint)를 설정하였다. 좌우 스프로켓의 구동축과 수집부 및 이송부 구동축에는 Expression 함수를 적용하여 현장 계측된 회전속도를 입력 조건으로 부여하였다. 수집부와 이송부는 각각 기어 체인 기구로 모델링하였으며, 동일하게 LATK를 활용하여 링크 형상의 반복 구조와 스프로켓 간 접촉 조건을 구현하였다. 각 주요부에 설정된 조인트의 종류 및 위치는 Fig. 6에 나타내었다.
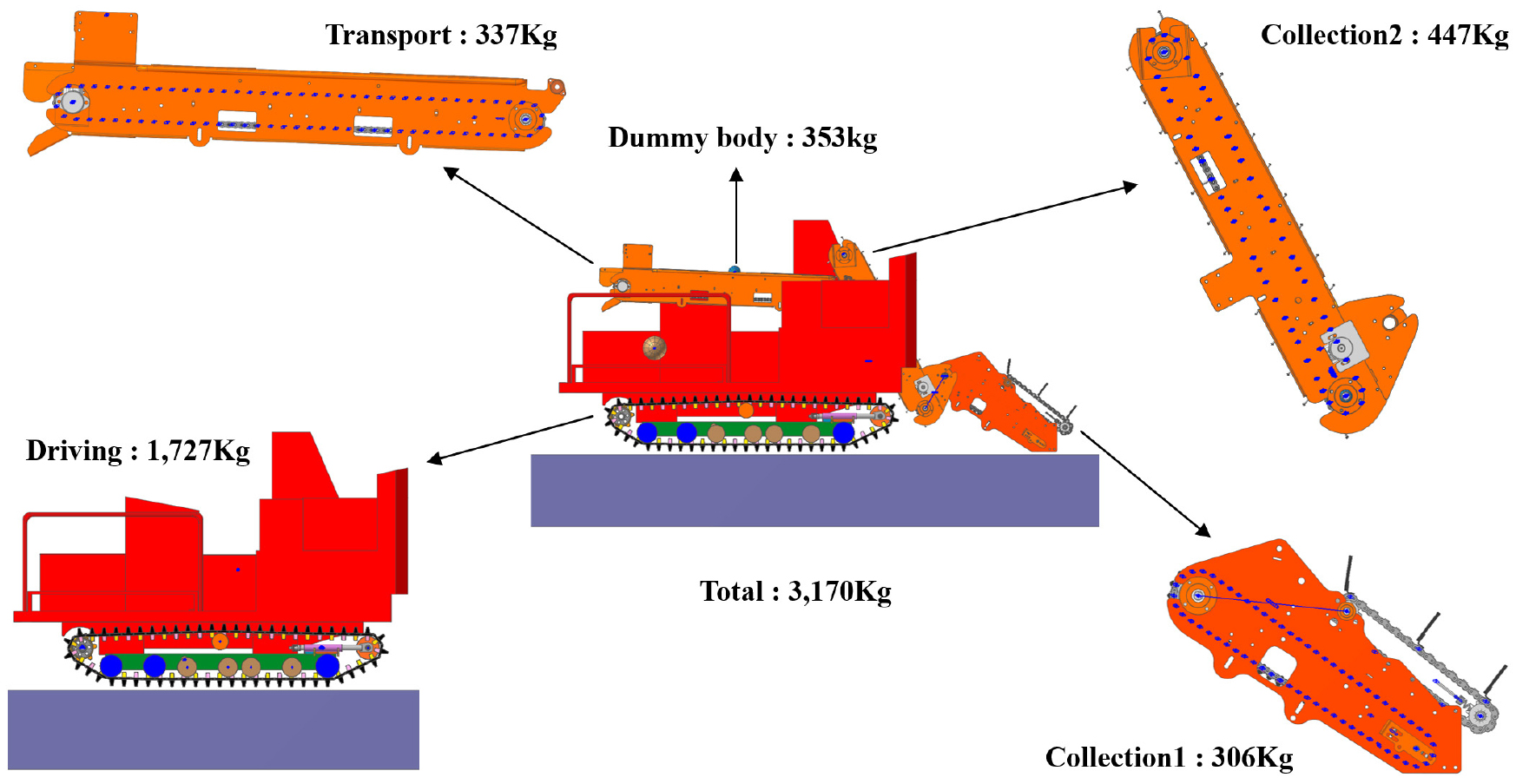
마늘 수집기의 무게를 모델에 반영하기 위하여 각 주요부의 무게를 실측하였으며, 그 결과 주행부 1,727 kg, 수집부1이 306 kg, 수집부2가 447 kg, 이송부 337 kg으로 측정되었다. 배선 및 보조 프레임 등 개별 모델링이 어려운 요소를 보완하기 위하여 더미 바디(dummy body)의 무게를 353 kg으로 설정하여 수집기 전체 무게를 3,170 kg으로 정의하였다. 실측 무게를 기반으로 산정된 차량의 무게 중심(-7.771, -90.913, -948.177)은 Fig. 7과 같다. 또한 각 주요부에 대한 제원을 Table 3에 정리하였다.
시뮬레이션은 합천 및 의성 토양 조건에서 실작업 시 계측된 각 주요부의 회전속도 데이터를 모델의 입력 조건으로 적용하여 수행하였다. 동일한 회전속도 입력 조건 하에서 시뮬레이션으로 산출된 각 주요부의 구동 토크 및 소요동력을 필드 시험 계측 결과와 비교함으로써 모델의 예측 정확도를 검증하였다.
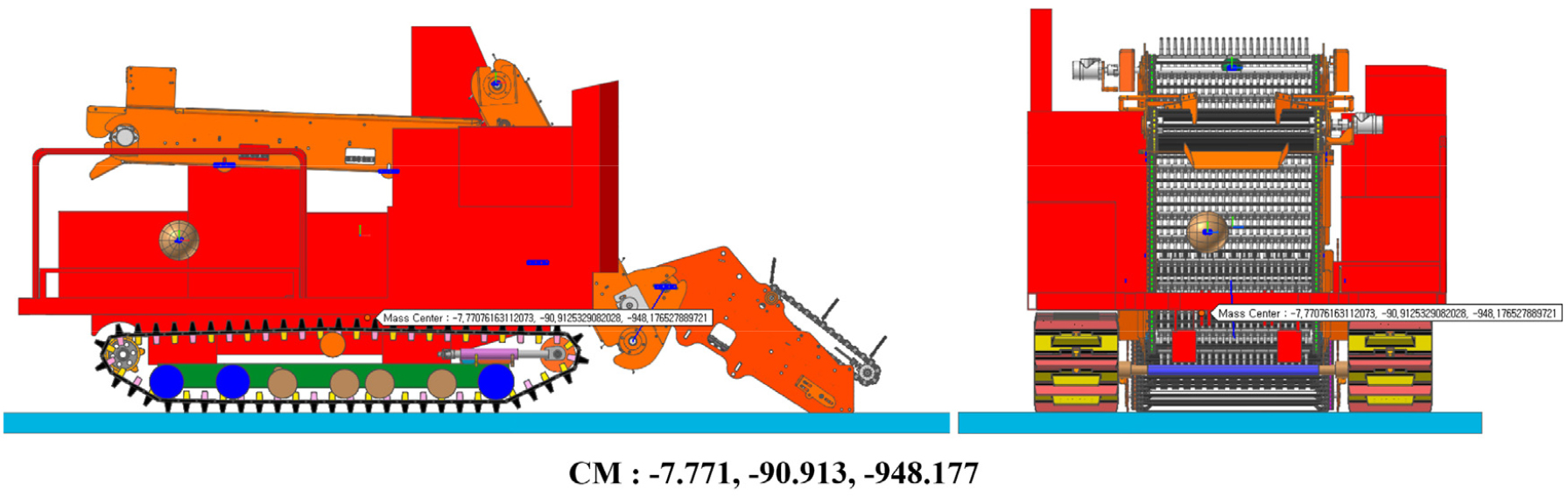
Table 3.
Dimensions of the self-propelled garlic collector for the simulation model
데이터 분석
계측된 데이터를 기반으로 각 주요부의 소요동력을 산출하였다. 수집부와 이송부의 유압 소요동력은 식 (1)과 같이 유량 및 압력 데이터로부터 산출하였으며, 유압 효율()은 선행연구를 참고하여 90%를 적용하였다(Kim et al., 2019).
여기서, : 소요동력(kW), : 압력(bar), : 유량(L/min), : 유압 효율이다.
주행부의 소요동력은 식 (2)와 같이 좌우 스프로켓의 토크 및 회전속도로부터 각각 산출한 후 합산하였다.
여기서, : 소요동력(kW), : 스프로켓 토크(N·m), : 스프로켓 회전속도(rpm)이다.
시뮬레이션 결과와 필드 계측 결과 간 차이의 통계적 유의성을 평가하기 위하여 통계분석 소프트웨어(IBM SPSS Statistics 30, IBM Corp., Armonk, NY, USA)를 이용하여 대응표본 t-test (paired-sample t-test)를 수행하였다. 시뮬레이션과 계측이 동일 시점·동일 입력 조건에서 짝지어 산출된 데이터임을 고려하여 대응 표본으로 설정하였으며, 유의수준 (α) 0.05에서 양측 검정으로 분석하였다. 분석에 사용된 표본 수는 합천 조건 n = 518, 의성 조건 n = 800이며, p-value가 0.05 미만인 경우 두 결과 간 차이가 통계적으로 유의한 것으로 판단하였다. 또한 시뮬레이션 모델의 예측 정확도는 식 (3)과 같이 정의된 상대오차(relative error)로 평가하였다.
시뮬레이션 결과와 필드 계측 결과의 분포 특성은 평균 및 표준편차를 포함한 기술통계 분석과 박스 플롯을 통해 비교하였다.
Results and Discussion
수집기 주행부 부하 시뮬레이션
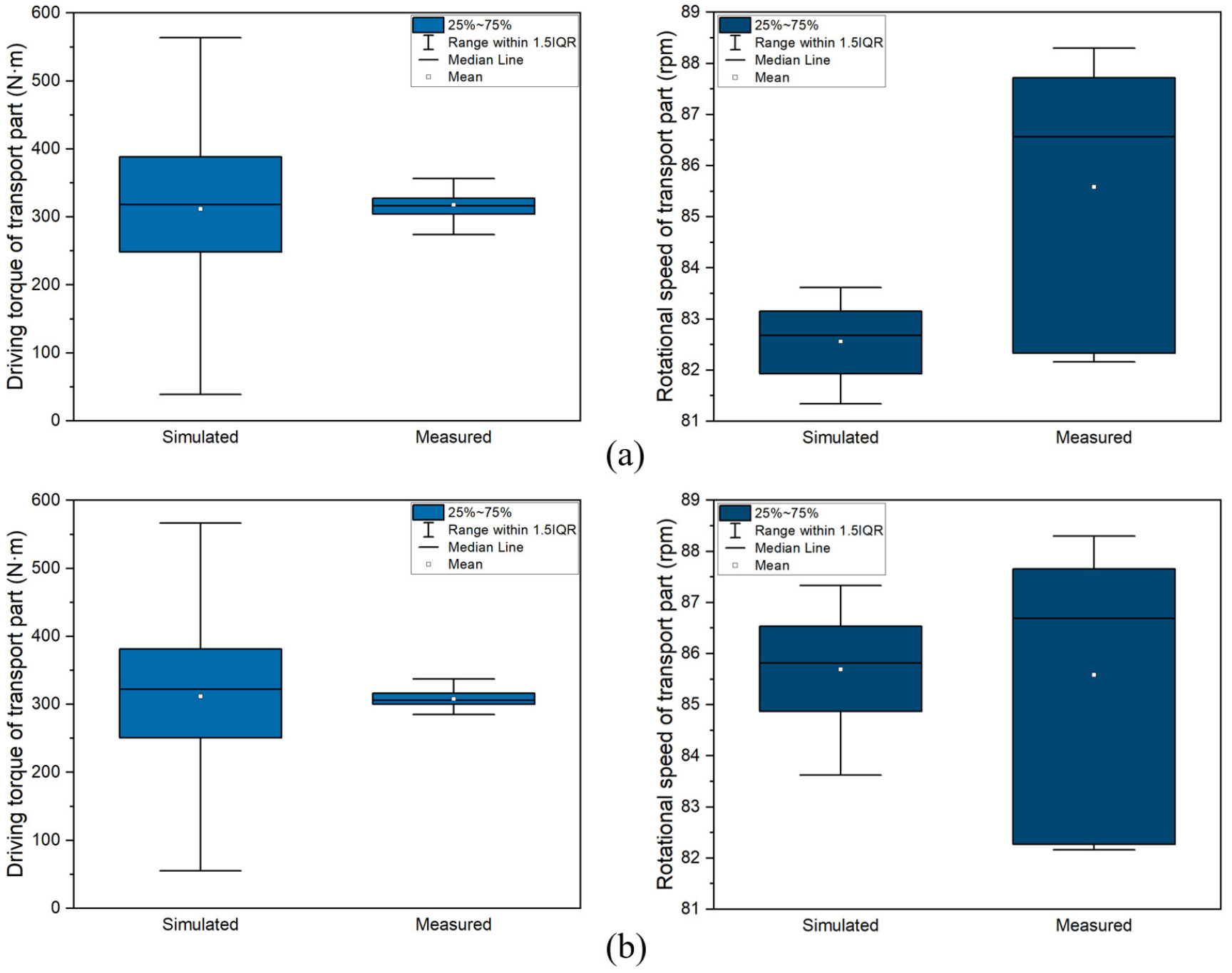
합천 및 의성 토양 조건에서 주행부 좌·우 스프로켓의 구동 토크 및 회전속도에 대한 시뮬레이션 결과와 필드 계측 결과의 분포는 Fig. 8과 같이 나타났다. 두 토양 조건 모두에서 시뮬레이션 결과는 필드 계측 결과와 전반적으로 유사한 평균 수준을 나타냈다. 토크의 경우 시뮬레이션 결과에서 상대적으로 큰 분포 범위가 나타났으며, 특히 의성 조건에서 이러한 경향이 두드러졌다. 반면 회전속도는 시뮬레이션과 계측 결과 모두 비교적 유사한 수준을 나타냈으나, 의성 조건에서는 계측값의 분포 범위가 상대적으로 크게 나타났다.
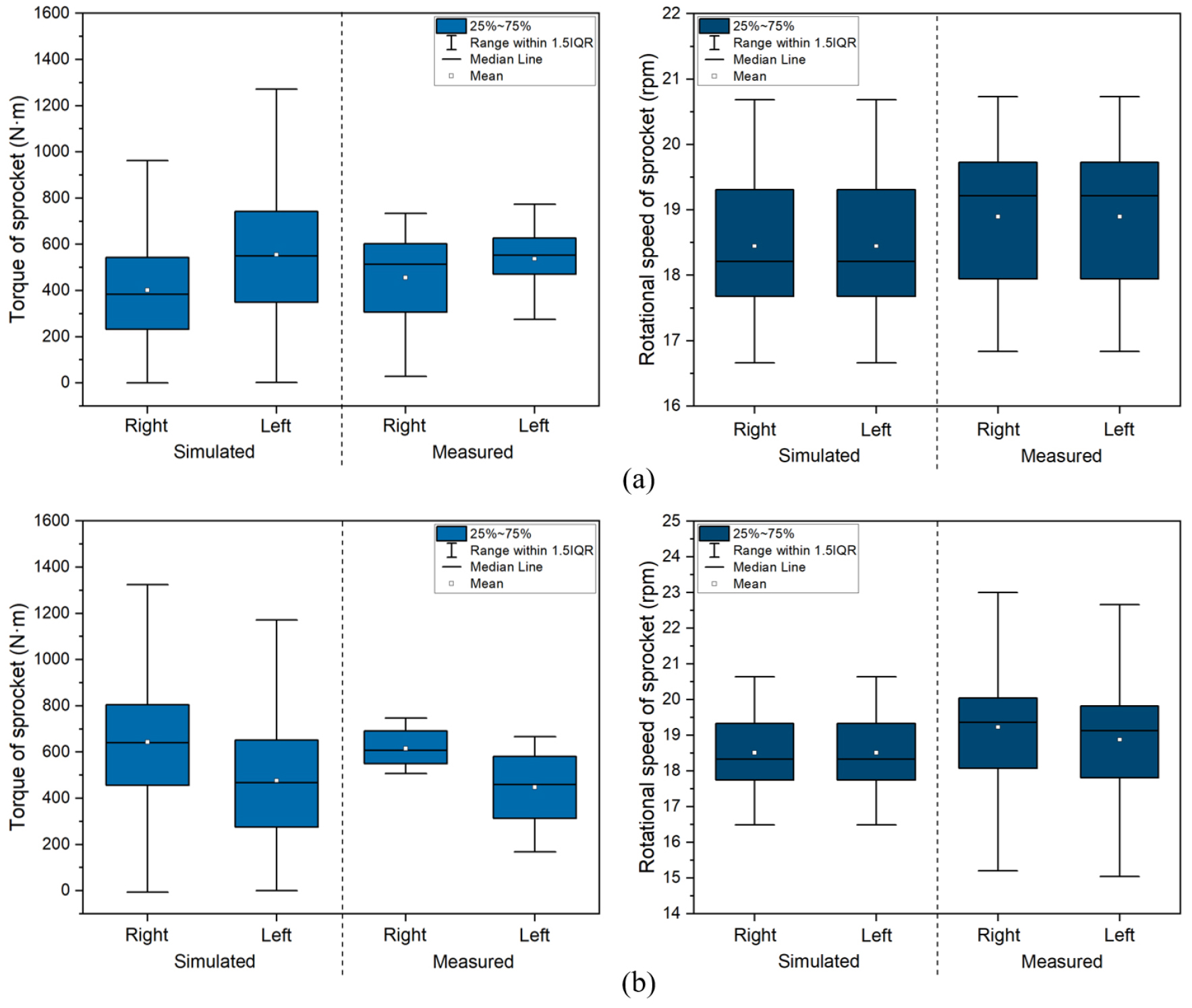
주행부의 시뮬레이션 결과와 필드 계측 결과의 상대오차는 Table 4와 같이 나타났다. 회전속도의 상대오차는 모든 조건에서 약 2.1–3.6% 수준으로 비교적 낮게 나타났으며, 시뮬레이션 결과와 필드 계측 결과가 전반적으로 유사한 수준을 보였다. 구동 토크의 상대오차는 합천 조건에서 3.5–12.1%, 의성 조건에서 4.5–6.4% 범위로 나타났으며, 합천 조건의 우측 스프로켓에서 가장 높은 오차가 확인되었다. 이는 합천 조건의 미사질양토에서 토양 강도 및 변형저항이 상대적으로 낮아 크롤러–지면 접촉 상태, 표층 침하 및 슬립 변동이 증가하였기 때문으로 판단된다. 반면 의성 조건의 식양토에서는 크롤러–지면 접촉 조건이 비교적 안정적으로 유지되어 구동 토크 예측 오차가 감소한 것으로 해석된다. 또한 토크의 분포 범위는 시뮬레이션 결과에서 상대적으로 크게 나타났는데, 이는 크롤러–지면 접촉 및 토양 상호작용 특성이 시뮬레이션 모델에서 단순화되어 반영된 영향으로 판단된다. 전반적으로 구동 토크의 상대오차는 최대 12.1% 수준으로 나타나, 개발된 시뮬레이션 모델이 실제 작업 조건에서의 주행부 부하 특성을 비교적 잘 재현한 것으로 판단된다.
Table 4.
Comparison of simulation and field measurement results for the driving part
수집기 수집부 부하 시뮬레이션
합천 및 의성 토양 조건에서 수집부 구동축의 구동 토크 및 회전속도에 대한 시뮬레이션 결과와 필드 계측 결과의 분포는 Fig. 9와 같이 나타났다. 두 토양 조건 모두에서 시뮬레이션 결과는 필드 계측 결과와 유사한 평균 수준을 나타냈다. 반면, 구동 토크는 합천 조건에서 계측값 166.6 N·m 대비 시뮬레이션값 184.8 N·m으로 18.2 N·m 높게 나타났으며, 의성 조건에서는 계측값 173.2 N·m 대비 시뮬레이션값 164.8 N·m으로 8.4 N·m 낮게 나타났다. 회전속도의 경우 합천 조건에서는 시뮬레이션 결과가 계측값 대비 3.4 rpm 높게 나타났으며, 의성 조건에서는 시뮬레이션과 계측 결과의 차이가 0.2 rpm으로 전반적으로 유사한 수준을 나타냈다.
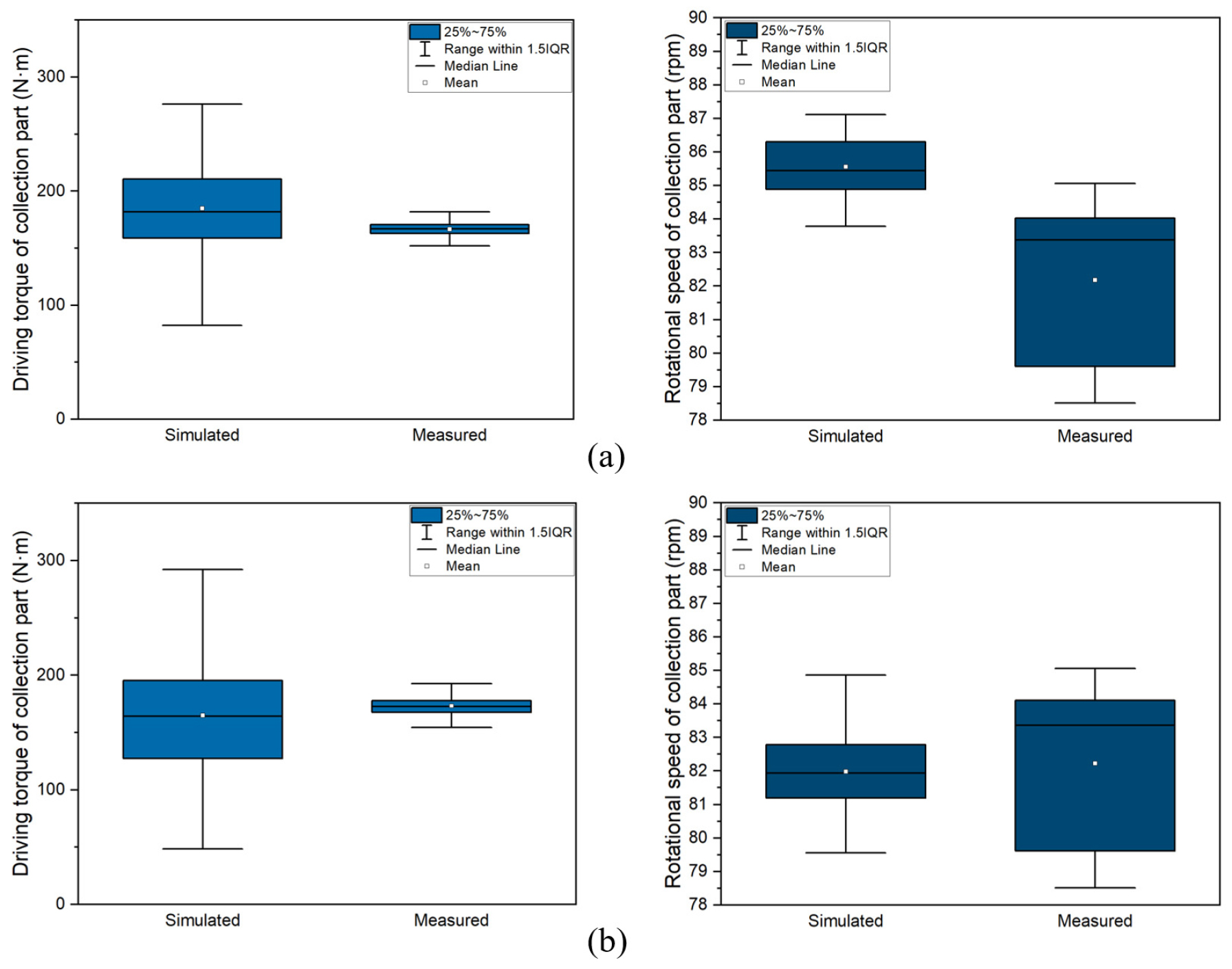
수집부의 시뮬레이션 결과와 필드 계측 결과의 상대오차는 Table 5와 같이 나타났다. 회전속도의 상대오차는 합천 조건에서 4.1%, 의성 조건에서 0.2%로 나타났으며, 구동 토크의 상대오차는 합천 조건에서 약 10.9%, 의성 조건에서 약 4.8%로 나타났다. 합천 조건에서는 시뮬레이션 토크가 계측값 대비 다소 높게 나타났으며, 이는 수집부 체인 및 롤러 간 접촉 조건과 실제 작업 중 발생하는 부하 변동 특성이 시뮬레이션 모델에서 단순화되어 반영된 영향으로 판단된다. 전반적으로 의성 조건에서 상대오차가 감소하는 경향을 보였으며, 두 토양 조건 모두에서 시뮬레이션 결과와 필드 계측 결과는 유사한 수준의 평균값을 나타냈다. 그러나 토크의 분포 범위는 시뮬레이션 결과에서 상대적으로 크게 나타나 실제 작업 중 발생하는 동적 부하 변동 특성이 모델에서 완전히 반영되지 못한 것으로 판단된다.
Table 5.
Comparison of simulation and field measurement results for the collection part
수집기 이송부 부하 시뮬레이션
합천 및 의성 토양 조건에서 이송부 구동축의 구동 토크 및 회전속도에 대한 시뮬레이션 결과와 필드 계측 결과의 분포는 Fig. 10과 같이 나타났다. 두 토양 조건 모두에서 시뮬레이션 결과는 필드 계측 결과와 유사한 평균 수준을 나타냈으며, 특히 의성 조건에서 시뮬레이션과 계측의 평균값이 더욱 근접한 수준을 보였다. 구동 토크는 합천 조건에서 계측값 317.8 N·m 대비 시뮬레이션값 311.7 N·m으로 6.1 N·m 낮게 나타났으며, 의성 조건에서는 계측값 308.0 N·m 대비 시뮬레이션값 311.6 N·m으로 3.6 N·m 높게 나타났다. 회전속도의 경우 합천 조건에서는 시뮬레이션 결과가 계측값 대비 3.0 rpm 낮게 나타났으며, 의성 조건에서는 시뮬레이션과 계측 결과의 차이가 0.1 rpm으로 전반적으로 유사한 수준을 나타냈다.
이송부의 시뮬레이션 결과와 필드 계측 결과의 상대오차는 Table 6과 같이 나타났다. 회전속도의 상대오차는 합천 조건에서 3.5%, 의성 조건에서 0.1%로 나타났으며, 구동 토크의 상대오차는 합천 조건에서 약 1.9%, 의성 조건에서 약 1.2%로 두 토양 조건 모두 다른 주요부에 비해 낮은 수준을 나타냈다. 구동 토크의 분포 범위는 시뮬레이션 결과에서 상대적으로 크게 나타났으며, 이는 이송부 체인 및 링크 간 접촉 조건과 실제 작업 중 발생하는 부하 변동 특성이 시뮬레이션 모델에서 단순화되어 반영된 영향으로 판단된다. 전반적으로 의성 조건에서 상대오차가 감소하는 경향을 보였으며, 두 토양 조건 모두에서 시뮬레이션 결과와 필드 계측 결과는 유사한 수준의 평균값을 나타냈다. 세 주요부 중 이송부에서 가장 낮은 오차 수준이 확인되었으며, 이는 이송부가 토양 조건의 직접적인 영향을 상대적으로 적게 받는 구조적 특성에 기인한 것으로 판단된다.
Table 6.
Comparison of simulation and field measurement results for the transport part
수집기 전체 소요동력 시뮬레이션
합천 및 의성 토양 조건에서 마늘 수집기 주요부별 및 전체 소요동력에 대한 시뮬레이션 결과와 필드 계측 결과의 비교는 Fig. 11과 같이 나타났다. 두 토양 조건 모두에서 시뮬레이션 결과는 필드 계측 결과와 전반적으로 유사한 평균 수준을 나타냈다. 전체 소요동력의 경우 합천 조건에서는 계측값 6.31 kW 대비 시뮬레이션값 6.19 kW로 0.12 kW 낮게 나타났으며, 의성 조건에서는 계측값과 시뮬레이션값이 모두 6.36 kW로 거의 일치하는 수준을 보였다. 반면 시뮬레이션 결과의 표준편차는 계측값 대비 전반적으로 크게 나타났으며, 의성 조건에서는 계측값의 표준편차가 합천 대비 상대적으로 작게 나타났다.
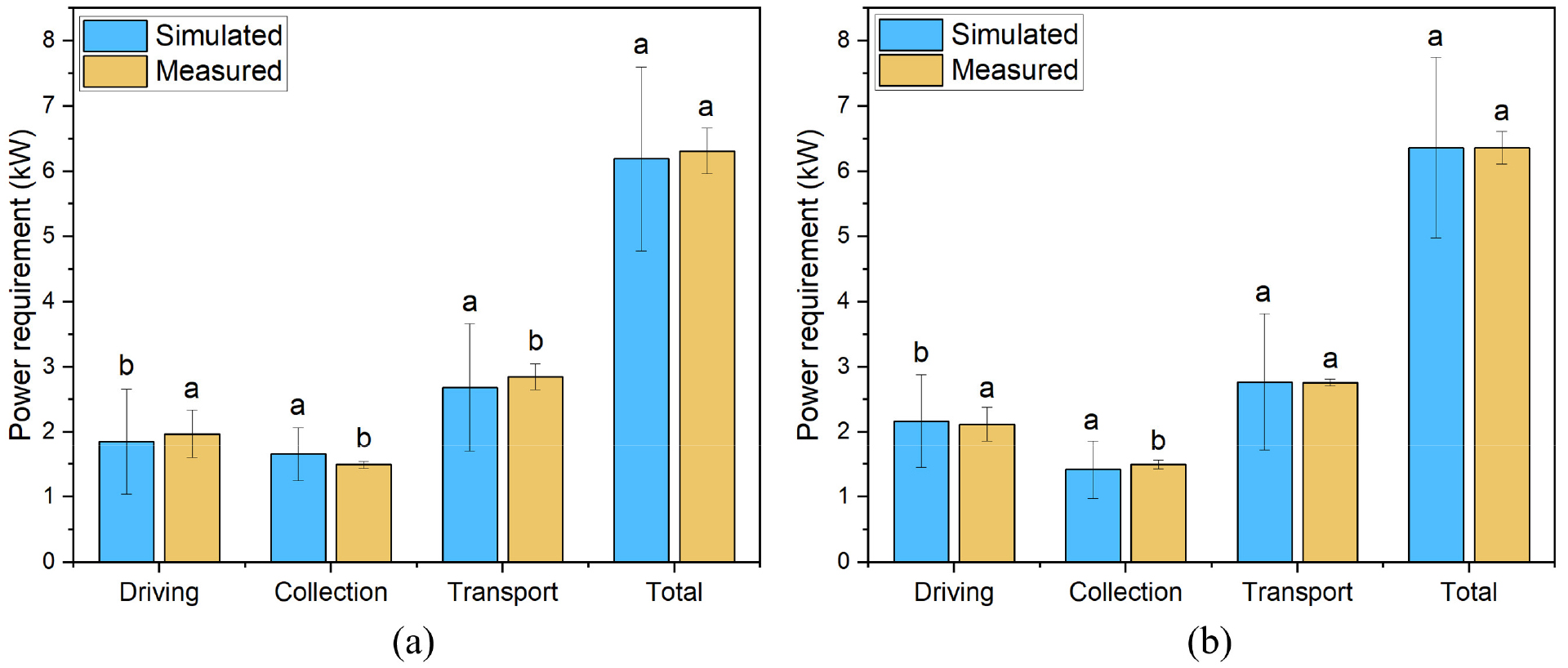
각 주요부 및 전체 시스템 소요동력의 상대오차 및 t-test 결과는 Table 7과 같이 나타났다. 주요부별 상대오차는 합천 조건에서 6.0~11.4%, 의성 조건에서 0.4~4.7% 범위로 나타나, 의성 조건에서 전반적으로 오차가 감소하는 경향을 보였다. 반면 전체 소요동력의 상대오차는 합천 조건에서 1.8%, 의성 조건에서 0.0003%로, 주요부별 오차 대비 현저히 낮은 수준을 나타냈다. 이는 각 주요부별 과대·과소 추정 오차가 합산 과정에서 상호 상쇄된 결과로 해석된다. 실제로 의성 조건에서 주행부 소요동력은 시뮬레이션이 계측값 대비 약 2.4% 높게 산출된 반면, 수집부는 약 4.7% 낮게 산출되어 합산 과정에서 오차가 상쇄되었다. 대응표본 t-test 결과 주요부별 소요동력은 합천 조건에서 주행부, 수집부, 이송부 모두 유의한 차이가 확인되었으며(p < 0.05), 의성 조건에서는 수집부에서만 유의한 차이가 확인되었다(p < 0.05). 한편 전체 소요동력은 합천(p = 0.062) 및 의성(p = 0.987) 두 조건 모두에서 통계적으로 유의한 차이가 존재하지 않아, 시스템 전체 수준에서 시뮬레이션 모델이 계측 결과와 동등한 재현성을 보임을 확인하였다.
Table 7.
Comparison of simulation and field measurement results for total power requirement
Conclusion
본 연구에서는 40.2 kW급 자주식 마늘 수집기를 대상으로 주행부, 수집부, 이송부를 각각 독립된 서브시스템으로 구성한 동역학 시뮬레이션 모델을 개발하였다. 주행부는 무한궤도 구조를 반영하여 스프로켓, 아이들러, 상부 및 하부 롤러와 궤도 링크로 구성하였으며, 수집부와 이송부는 체인 기구의 반복 링크 구조와 스프로켓 간 접촉 조건을 구현하였다. 각 주요부의 질량은 실제 장비의 개별 무게 측정 결과를 기반으로 적용하였다.
시뮬레이션 모델의 검증을 위하여 각 주요부의 부하 계측시스템을 개발하고, 합천 및 의성 지역에서 실작업 부하를 계측하였다. 계측된 회전속도를 시뮬레이션 입력 조건으로 적용하고, 산출된 구동 토크 및 소요동력을 필드 계측 결과와 비교하여 모델을 검증하였다. 주요부별 소요동력의 상대오차는 주행부 2.4~6.1%, 수집부 4.7~11.4%, 이송부 0.4~6.0% 범위로 나타났으며, 전체 소요동력은 두 토양 조건 모두에서 2% 이내의 상대오차를 나타냈다. 또한 의성 조건에서 전반적으로 상대오차가 감소하는 경향을 보였으며, 이는 토양 조건 및 크롤러–지면 접촉 특성 차이의 영향으로 판단된다.
이러한 결과는 개발된 시뮬레이션 모델이 실제 작업 조건에서의 전체 부하 특성을 비교적 잘 재현함을 보여준다. 특히 본 모델은 반복적인 현장 실험 없이 설계 변경에 따른 소요동력 변화를 사전에 예측할 수 있어, 가상 제품 개발(Virtual product development) 단계의 해석 도구로 활용될 수 있다. 앞서 각 주요부의 질량을 실측값으로 반영하고 수집부·이송부를 체인 반복 링크 구조로 구현한 모델 구성은 차체 경량화에 따른 부하 변화 평가와 링크 구조 변경이 구동 토크에 미치는 영향 분석을 가능하게 하며, 검증된 주요부별·전체 소요동력 예측 결과는 엔진 및 동력전달계의 용량 선정과 동력 여유율 검토, 즉 파워트레인 용량 최적화의 설계 근거를 제공할 수 있다.
다만 본 연구에서는 단일 주행속도 조건(0.257 m/s)에서의 검증만 수행하였으며, 다양한 주행속도 및 작업 조건에 대한 검증은 수행되지 않았다. 또한 토양–크롤러 간 상호작용은 단순화된 접촉 조건으로 구현되었기 때문에 실제 포장의 복잡한 토양 거동을 충분히 반영하는 데에는 한계가 있다. 향후 연구에서는 실제 포장의 토양 물성을 반영한 DEM 토양 모델과 본 MBD 모델을 연성한 MBD–DEM 연성해석을 통해 토양–수집기 상호작용을 보다 정밀하게 반영할 수 있는 소요동력 해석 모델을 개발할 계획이다.
